Mega Bot: Unterschied zwischen den Versionen
Weitere Optionen
Keine Bearbeitungszusammenfassung |
|||
| (21 dazwischenliegende Versionen von 2 Benutzern werden nicht angezeigt) | |||
| Zeile 1: | Zeile 1: | ||
[[Kategorie:öffentlich]] | |||
{{aktives Projekt|Kontakt=EmpirePhoenix|öffentlich=ja}} | |||
Noch im Aufbau, Beschreibungen folgen | |||
== '''MK1 A&B (FWD&AWD)''' == | |||
<gallery> | |||
Datei:MK1 a.jpg | Von Variante A FWD gibt es leider keine Bilder | |||
Datei:MK1 a2.jpg | Beleuchtung | |||
</gallery> | |||
== ''' | Auf Modellbau basis, erste Versuche für ein größeres Fahrzeug. | ||
Dieses Fahrzeug hatte leider multiple Probleme: | |||
* Die 4 Brushless controller waren nicht vernünftig Synchronisierbar, einer hat immer durch EMF nicht sauber funktioniert | |||
* Die Radmuttern haben sich auf der einen Seite von selber gelöst | |||
* Die getreibe haben die Belastung nicht durchgehalten und hatten relativ schnell Karies | |||
* Der 5Fach Parallele LIFEPo hat ewig lange zum laden benötigt | |||
Dies führte zu der Entscheidung eines späteren neubaus, idealerweise ohne Getriebe. | |||
== '''MK2''' == | |||
=== Entstehungsgeschichte: === | === Entstehungsgeschichte: === | ||
<gallery> | |||
Datei:1.jpeg | | |||
Datei:2.jpeg | | |||
Datei:3.jpeg | | |||
Datei:4.jpeg | | |||
Datei:5.jpeg | | |||
Datei:6.jpeg | | |||
Datei:7.jpeg | | |||
Datei:8.jpeg | | |||
Datei:9.jpeg | | |||
Datei:10.jpeg | | |||
Datei:11.jpeg | | |||
</gallery> | |||
Nach finden von einer günstigen Quelle für alte Hoverboard motoren hat dieses Projekt gestartet. | |||
=== Hardware === | === Hardware === | ||
Akku: | |||
2* https://hobbyking.com/en_us/basher-4000mah-6s-65c-hardcase-pack.html 5AH akku mit schnelllade fähigkeit (20A) | |||
alternative: | |||
2* 6S multistar pack | |||
belastbarkeit sollte konstant mit 40A möglich sein! (und C raten sind stark gelogen, der 65C basher hat eher 30C und hat bei mir 90C draufgedruckt) | |||
Überwachung: | |||
150A 60V G.T.Power High Precision Watt | |||
-> Spannungsanzeige und WH verbrauch. | |||
Regler: | |||
2* Greentime 600W regler, bei Bestellung aufpassen das es die Version mit regenbremse ist! | |||
https://de.aliexpress.com/item/Greentime-36V-48V-500W-600W-30Amax-BLDC-Motor-Controller-Electric-Bike-Tricycle-Controller-Driver/2012487273.html | |||
2* No-Name 350W regler | |||
https://de.aliexpress.com/item/OOTDTY-Aluminium-36-V-48-V-350-Watt-Elektro-fahrrad-e-bike-Roller-B-rstenlosen-DC/32841355316.html | |||
Lenkung: | |||
Linearer Dachfensteröffner 24V 100mm Hub | |||
https://www.ebay.de/itm/Linearantrieb-Elektrozylinder-24V-1000N-IP-66-Hube-von-100mm-bis-400mm/222220147517 | |||
Gibt es in 12V und 24V, gibt es in unterschiedlichen Geschwindigkeiten. Optional mit Hall sensor | |||
Steuerung: | |||
10K poti für schub (+ arm mit Rückholfeder als totmanschalter), einrastender Taster für rückwärts. Schalter für notaus (an den controller Steuerung input) | |||
3 Wege Schalter für mehr links mehr rechts, umgesetzt über abgriff zwischen beiden akkus 0V und wechsel von +24 und -24 je nach akku. | |||
=== Lessons Learned === | === Lessons Learned === | ||
*Die größeren Reifen sind gut für geschwindikeit, haben aber schelchtes Drehmoment als die kleinen (bei nur 2 würde vermutlich die Wicklung thermisch leiden) | |||
Drehmoment beim Anfahren ist immernoch extrem. | |||
-> Soft anfahren ermöglichen/ Modus einbauen, der diesen erzwingt (GastFahrer) | |||
*Lenkung noch etwas zu fragil. | |||
-> Auf für Lenkung 4Kant benutzten statt L stangen, Verwindungssteiffheit besser | |||
*Absolute Llenkung (nach links, nach rechts) wäre deutlich nützlicher als manuell die Lenkung anhand der Fahrtrichtung korrigieren zu müssen. | |||
*Strom & Drehzahlüberwachung (die Regler liefern je anch Speed pulse) wäre nützlich, erkennung rad in luft, schlechter Grip. (Derzeit rutschendes hochdrehen, bis Profil anfängt zu stinken.) | |||
*Intelligentere Anschteuerung der Motoren, (derzeit alle identischen Schub) probleme mit Kurvenfahren durch fehlende Differential Logik. | |||
-> Stromsense anschlüsse für alle Motoren, nachregulierung von Powerlevel über Pulse signal, berücksichtigen hierbei von Lenkungsstatus | |||
*Wattmeter nicht lesbar als fahrer, keine Info über akkustand beim fahren lesbar. WH anzeige wäre nützlich um ein Stranden zu verhindern. | |||
-> Anbringung vorne unten lesbar vom Fahrer aus, alternativ verlängerung Displayanschluss. | |||
-> Zusätzliche einzel Zell überwachung sinnvoll, um problemens Vorzubeugen. | |||
*Bessere bremse. Für normales Bremsen reicht die derzeitige, aber im notfall wäre eine starke bremse zu bevorzugen | |||
-> Automatische zuschaltung bei aktiven Bremsen, wenn nicht nur von Gas gegangen wird. | |||
-> Mögliche Lösung kurzschluss an unbenutzten Motorenpaar per Solidstate relay und pwm | |||
*Großer kurvenradius | |||
-> Verkürzung ladefläche um radius zu verringern | |||
-> Benutztung der fläche über Lenkung als ladefläche alternativ ermöglichen | |||
-> Intelligentere Diff ansteuerung für kurven | |||
-> Overdrive-Mode, um in Kurven bei glatten modus reinzudrücken, derzeit nur bei extremen power leven möglich, da alle 4 Räder beschleunigen, nur hinten gas geben bei scharfen kurven | |||
== '''MK3''' == | |||
An dieser Stelle ein risigen Dank an @Kihoma und @comfix21 ohne welche diese Version nicht so schnell oder überhaupt möglich gewesen wäre. | |||
<gallery> | |||
Datei:MK3-1.jpg | Neue Lenkuns-Aufhängung, mit Aussparung für stärkeren Lenkeinschlag | |||
Datei:MK3-2.jpg | Neues Lenkservo, mit Poti zur Bestimmung der aktuellen Position | |||
Datei:MK3-3.jpg | Prototyp Steuerung auf Holzbrett | |||
Datei:MK3-4.jpg | Test Aufbau mit weitesgehend finaler Mechanik | |||
Datei:MK3-6.jpg | Neuer Schubcontroller, deutliche Miniaturisierung gegenüber dem Holzbrett | |||
Datei:MK3 main.png | Schubcontroller pcb | |||
Datei:MK3-7.jpg | Neue Version des Lenkungscontrollers | |||
Datei:MK3-Secondary.png | Lenkungscontroller pcb (zweiter Versuch) | |||
Datei:MK3-8.jpg | Jetzt mit Notaus | |||
Datei:MK3-9.jpg | Und beschrifteten Steuerleitungen | |||
</gallery> | |||
Software für interessierte liegt hier: | |||
https://github.com/empirephoenix/MegaBot-MK3 | |||
Das gesamte System wird jetzt über eine RC-Fernsteuerung bedient, da sich das Kabel vom MK2 Controller as nicht zu unterschätzende Gefahr gezeigt hat. | |||
Changes: | |||
Software: | |||
* Es gibt jetzt ein 3"Gang" version, Modus 1 ist max 5km, 2 bei grob 20 und 3 hab ich nie getestet, da zu schnell. Es ist nicht möglich Modus 1 zu verlassen für Gastfahrer. | |||
* Die Lenkung funktioniert jetzt absolut, und muss nicht mehr manuell austariert werden. Die Lenkung besitzt einen Selbstkalibierungsmodus. | |||
Hardware: | |||
* Es extistieren zwei Arduinos die zum einen die Geschwindigkeitssteuerung übernhmen und zum anderen für die Lenkung zuständig sind. Diese Trennung ist extra so vorgenommen, dass im Falle eines ausfalls angehalten oder noch gelenkt werden kann. | |||
* Zusätzlich existiert ein Remote-RC-Relay, mit welchem der Steuerstrom von den Motorreglern abgeschaltet werden kann, ohne diesen können diese selbst bei einem Defekt die Brushlessmotoren nicht in Bewegung halten. | |||
* Die Lenkung wurde komplett neu gebaut, zum einen ist diese jetzt im Gehäuse integriert, statt hinten dran (vorteil im Kofferraum von wegen Platzverbrauch) | |||
* Zum anderen ist die Lenkung jetzt über 4 Scharniere umgesetzt und mit 4Kant Alu gebaut, hierdurch ist Sie deutlich stabiler und hat keine Verformungsprobleme unter Last mehr. | |||
* Es exitiert jetzt ein Batterietrennschalter, der auch unter Last zuverlässig trennt | |||
* Es existiert jetzt eine vom Fahrer sichtbare Watt/Ampere/Volt Anzeige | |||
* Durch den geringeren Achsenstand ist jetzt ein deutlich kleinerer Wendekreis möglich | |||
* Es existiert eine minimale Beleuchtung, für MK4 ist ein weiter Ausbau geplant | |||
* Die Steuerung befindet sich jetzt vollständig auf extra hierzu angefertigten Platinen, fliegende Verdrahtung und das Holzbrett vom Prototyp wurden eleminiert | |||
* Dank @Acid vernüftige Alu-Gehäuse für die Elektronik womit ein rudimentärer spritz schutz existieren sollte | |||
* Neuer stabilerer Akkuhalter | |||
Verworfen: | |||
* Motoren werden weiterhin alle mit dem gleichen Signal angesteuert, das fehlende elektrische Differenzial hat sich als nicht nachteilig erwiesen. | |||
* Bis Modus 2 reicht die derzeitige Bremse noch aus, eine verbesserung ist für MK4 vorgesehen | |||
== ''' | == '''MK4''' == | ||
Geplante Änderungen zum Camp | |||
* 6WD statt 4WD (besser akku effiziens, da mittlere Motoren nicht geschoben werden) | |||
* Bessere Bremsen | |||
* Mehr beleuchtung | |||
* Neuer Controller der nochmals kleiner wird (geplant 2xarduino Nano + 1xESP für Lichtfoo) und möglichst alle externen Bauteile eleminieren soll. | |||
* Controller Wasserdicht | |||
* Größerer Akku | |||
* Raspberry because reasons? | |||
Aktuelle Version vom 17. Dezember 2018, 09:37 Uhr
Noch im Aufbau, Beschreibungen folgen
MK1 A&B (FWD&AWD)
-
 Von Variante A FWD gibt es leider keine Bilder
Von Variante A FWD gibt es leider keine Bilder -
 Beleuchtung
Beleuchtung


Auf Modellbau basis, erste Versuche für ein größeres Fahrzeug. Dieses Fahrzeug hatte leider multiple Probleme:
- Die 4 Brushless controller waren nicht vernünftig Synchronisierbar, einer hat immer durch EMF nicht sauber funktioniert
- Die Radmuttern haben sich auf der einen Seite von selber gelöst
- Die getreibe haben die Belastung nicht durchgehalten und hatten relativ schnell Karies
- Der 5Fach Parallele LIFEPo hat ewig lange zum laden benötigt
Dies führte zu der Entscheidung eines späteren neubaus, idealerweise ohne Getriebe.
MK2
Entstehungsgeschichte:











Nach finden von einer günstigen Quelle für alte Hoverboard motoren hat dieses Projekt gestartet.
Hardware
Akku: 2* https://hobbyking.com/en_us/basher-4000mah-6s-65c-hardcase-pack.html 5AH akku mit schnelllade fähigkeit (20A) alternative: 2* 6S multistar pack belastbarkeit sollte konstant mit 40A möglich sein! (und C raten sind stark gelogen, der 65C basher hat eher 30C und hat bei mir 90C draufgedruckt)
Überwachung: 150A 60V G.T.Power High Precision Watt -> Spannungsanzeige und WH verbrauch.
Regler: 2* Greentime 600W regler, bei Bestellung aufpassen das es die Version mit regenbremse ist! https://de.aliexpress.com/item/Greentime-36V-48V-500W-600W-30Amax-BLDC-Motor-Controller-Electric-Bike-Tricycle-Controller-Driver/2012487273.html 2* No-Name 350W regler https://de.aliexpress.com/item/OOTDTY-Aluminium-36-V-48-V-350-Watt-Elektro-fahrrad-e-bike-Roller-B-rstenlosen-DC/32841355316.html
Lenkung: Linearer Dachfensteröffner 24V 100mm Hub https://www.ebay.de/itm/Linearantrieb-Elektrozylinder-24V-1000N-IP-66-Hube-von-100mm-bis-400mm/222220147517 Gibt es in 12V und 24V, gibt es in unterschiedlichen Geschwindigkeiten. Optional mit Hall sensor
Steuerung: 10K poti für schub (+ arm mit Rückholfeder als totmanschalter), einrastender Taster für rückwärts. Schalter für notaus (an den controller Steuerung input) 3 Wege Schalter für mehr links mehr rechts, umgesetzt über abgriff zwischen beiden akkus 0V und wechsel von +24 und -24 je nach akku.
Lessons Learned
- Die größeren Reifen sind gut für geschwindikeit, haben aber schelchtes Drehmoment als die kleinen (bei nur 2 würde vermutlich die Wicklung thermisch leiden)
Drehmoment beim Anfahren ist immernoch extrem. -> Soft anfahren ermöglichen/ Modus einbauen, der diesen erzwingt (GastFahrer)
- Lenkung noch etwas zu fragil.
-> Auf für Lenkung 4Kant benutzten statt L stangen, Verwindungssteiffheit besser
- Absolute Llenkung (nach links, nach rechts) wäre deutlich nützlicher als manuell die Lenkung anhand der Fahrtrichtung korrigieren zu müssen.
- Strom & Drehzahlüberwachung (die Regler liefern je anch Speed pulse) wäre nützlich, erkennung rad in luft, schlechter Grip. (Derzeit rutschendes hochdrehen, bis Profil anfängt zu stinken.)
- Intelligentere Anschteuerung der Motoren, (derzeit alle identischen Schub) probleme mit Kurvenfahren durch fehlende Differential Logik.
-> Stromsense anschlüsse für alle Motoren, nachregulierung von Powerlevel über Pulse signal, berücksichtigen hierbei von Lenkungsstatus
- Wattmeter nicht lesbar als fahrer, keine Info über akkustand beim fahren lesbar. WH anzeige wäre nützlich um ein Stranden zu verhindern.
-> Anbringung vorne unten lesbar vom Fahrer aus, alternativ verlängerung Displayanschluss. -> Zusätzliche einzel Zell überwachung sinnvoll, um problemens Vorzubeugen.
- Bessere bremse. Für normales Bremsen reicht die derzeitige, aber im notfall wäre eine starke bremse zu bevorzugen
-> Automatische zuschaltung bei aktiven Bremsen, wenn nicht nur von Gas gegangen wird. -> Mögliche Lösung kurzschluss an unbenutzten Motorenpaar per Solidstate relay und pwm
- Großer kurvenradius
-> Verkürzung ladefläche um radius zu verringern -> Benutztung der fläche über Lenkung als ladefläche alternativ ermöglichen -> Intelligentere Diff ansteuerung für kurven -> Overdrive-Mode, um in Kurven bei glatten modus reinzudrücken, derzeit nur bei extremen power leven möglich, da alle 4 Räder beschleunigen, nur hinten gas geben bei scharfen kurven
MK3
An dieser Stelle ein risigen Dank an @Kihoma und @comfix21 ohne welche diese Version nicht so schnell oder überhaupt möglich gewesen wäre.
-
 Neue Lenkuns-Aufhängung, mit Aussparung für stärkeren Lenkeinschlag
Neue Lenkuns-Aufhängung, mit Aussparung für stärkeren Lenkeinschlag -
 Neues Lenkservo, mit Poti zur Bestimmung der aktuellen Position
Neues Lenkservo, mit Poti zur Bestimmung der aktuellen Position -
 Prototyp Steuerung auf Holzbrett
Prototyp Steuerung auf Holzbrett -
 Test Aufbau mit weitesgehend finaler Mechanik
Test Aufbau mit weitesgehend finaler Mechanik -
 Neuer Schubcontroller, deutliche Miniaturisierung gegenüber dem Holzbrett
Neuer Schubcontroller, deutliche Miniaturisierung gegenüber dem Holzbrett -
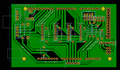 Schubcontroller pcb
Schubcontroller pcb -
 Neue Version des Lenkungscontrollers
Neue Version des Lenkungscontrollers -
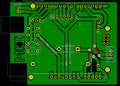 Lenkungscontroller pcb (zweiter Versuch)
Lenkungscontroller pcb (zweiter Versuch) -
 Jetzt mit Notaus
Jetzt mit Notaus -
 Und beschrifteten Steuerleitungen
Und beschrifteten Steuerleitungen










Software für interessierte liegt hier:
https://github.com/empirephoenix/MegaBot-MK3
Das gesamte System wird jetzt über eine RC-Fernsteuerung bedient, da sich das Kabel vom MK2 Controller as nicht zu unterschätzende Gefahr gezeigt hat.
Changes: Software:
- Es gibt jetzt ein 3"Gang" version, Modus 1 ist max 5km, 2 bei grob 20 und 3 hab ich nie getestet, da zu schnell. Es ist nicht möglich Modus 1 zu verlassen für Gastfahrer.
- Die Lenkung funktioniert jetzt absolut, und muss nicht mehr manuell austariert werden. Die Lenkung besitzt einen Selbstkalibierungsmodus.
Hardware:
- Es extistieren zwei Arduinos die zum einen die Geschwindigkeitssteuerung übernhmen und zum anderen für die Lenkung zuständig sind. Diese Trennung ist extra so vorgenommen, dass im Falle eines ausfalls angehalten oder noch gelenkt werden kann.
- Zusätzlich existiert ein Remote-RC-Relay, mit welchem der Steuerstrom von den Motorreglern abgeschaltet werden kann, ohne diesen können diese selbst bei einem Defekt die Brushlessmotoren nicht in Bewegung halten.
- Die Lenkung wurde komplett neu gebaut, zum einen ist diese jetzt im Gehäuse integriert, statt hinten dran (vorteil im Kofferraum von wegen Platzverbrauch)
- Zum anderen ist die Lenkung jetzt über 4 Scharniere umgesetzt und mit 4Kant Alu gebaut, hierdurch ist Sie deutlich stabiler und hat keine Verformungsprobleme unter Last mehr.
- Es exitiert jetzt ein Batterietrennschalter, der auch unter Last zuverlässig trennt
- Es existiert jetzt eine vom Fahrer sichtbare Watt/Ampere/Volt Anzeige
- Durch den geringeren Achsenstand ist jetzt ein deutlich kleinerer Wendekreis möglich
- Es existiert eine minimale Beleuchtung, für MK4 ist ein weiter Ausbau geplant
- Die Steuerung befindet sich jetzt vollständig auf extra hierzu angefertigten Platinen, fliegende Verdrahtung und das Holzbrett vom Prototyp wurden eleminiert
- Dank @Acid vernüftige Alu-Gehäuse für die Elektronik womit ein rudimentärer spritz schutz existieren sollte
- Neuer stabilerer Akkuhalter
Verworfen:
- Motoren werden weiterhin alle mit dem gleichen Signal angesteuert, das fehlende elektrische Differenzial hat sich als nicht nachteilig erwiesen.
- Bis Modus 2 reicht die derzeitige Bremse noch aus, eine verbesserung ist für MK4 vorgesehen
MK4
Geplante Änderungen zum Camp
- 6WD statt 4WD (besser akku effiziens, da mittlere Motoren nicht geschoben werden)
- Bessere Bremsen
- Mehr beleuchtung
- Neuer Controller der nochmals kleiner wird (geplant 2xarduino Nano + 1xESP für Lichtfoo) und möglichst alle externen Bauteile eleminieren soll.
- Controller Wasserdicht
- Größerer Akku
- Raspberry because reasons?